 Global - English
Global - English Spanish - Español
Spanish - Español French - Français
French - Français Russian - Pусский язык
Russian - Pусский язык Chinese - 中文
Chinese - 中文 Korean - 한국어
Korean - 한국어 Vietnamese - Tiếng Việt
Vietnamese - Tiếng ViệtЧто такое алгоритм ПИД-регулирования?
В практических инженерных приложениях алгоритм ПИД-регулирования является наиболее широко используемым алгоритмом. Следующий отрывок представляет собой конкретное представление о том, что такое алгоритм ПИД-регулирования.
Каков принцип работы алгоритма ПИД-регулирования?
Наиболее широко используемый закон пропорционального, интегрального и дифференциального управления регулятором называется алгоритмом ПИД-управления, также известным как ПИД-управление или ПИД-регулирование. ПИД-регуляторы выпускаются с почти 70-летней историей. Простая структура, хорошая стабильность и надежная работа стали одной из основных технологий промышленного управления. Когда структура и параметры объекта управления не полностью заданы, структура и параметры системного контроллера должны основываться на опыте и пуско-наладочных работах на месте, а применение технологии ПИД-управления является наиболее удобной технологией. Для алгоритма ПИД-управления существует ПИ-управление и ПД-управление. ПИД-регулятор работает путем расчета значений пропорционального, интегрального и дифференциального управления.
В настоящее время существует 3 вида относительно простых алгоритмов ПИД-управления, а именно: инкрементный алгоритм, алгоритм позиционного типа, дифференциальный алгоритм. Эти алгоритмы управления являются наиболее простыми и базовыми алгоритмами, имеют свои особенности и отвечают общим требованиям большинства средств управления.
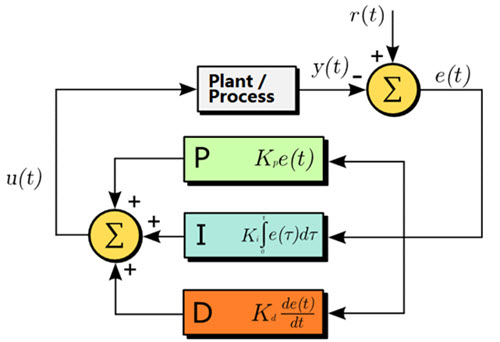
Полная формула выглядит следующим образом:
u(t) = Kp*e(t)+KiSe(t)+Kd[e(t)-e(t-1)]+u0
В процессе отладки алгоритма ПИД-регулирования следует отметить следующие шаги:
1. Замкните I и D, что означает установку их на 0 и увеличение P для создания колебаний;
2. Уменьшите P, чтобы найти критическую точку колебаний;
3. Увеличьте I, чтобы достичь целевого значения;
4. Повторно включите питание, чтобы проверить, соответствуют ли время перерегулирования, колебаний и стабилизации требованиям;
5. Уместно добавить некоторые дифференциальные условия для условий перерегулирования и колебаний;
Методы настройки параметров ПИД-регулятора
Настройка параметров ПИД-регулятора является основой проектирования векторной системы управления двигателем. Существует множество методов настройки параметров ПИД-регулятора, и их можно обобщить две категории:
1. Настройка теоретического расчета. Он определяет параметры регулятора на основе математической модели и теоретических расчетов. Данные, рассчитанные этим методом, нельзя использовать напрямую, их необходимо корректировать и модифицировать.
2.Метод инженерной настройки, который в основном опирается на инженерный опыт для выполнения непосредственно при тестировании системы управления, этот метод прост для понимания и широко используется в инженерной практике. Для методов настройки параметров ПИД-регулятора существуют метод критического соотношения, метод кривой отклика и метод затухания.
Методы имеют свои особенности: все они сначала тестируются, а затем создается инженерная эмпирическая формула для реализации настройки параметров контроллера. В настоящее время система ПИД-управления широко используется в автоматизации ПЛК и преобразователях частоты, при этом наиболее часто используемым методом является метод критического соотношения.
Если вам нужна дополнительная информация о том, что такое система ПИД-регулирования и принцип ее работы, пожалуйста, не стесняйтесь обращаться к нам, и наша техническая поддержка ответит вам в ближайшее время.
 Оставить сообщение
Оставить сообщение