 Global - English
Global - English Spanish - Español
Spanish - Español French - Français
French - Français Russian - Pусский язык
Russian - Pусский язык Chinese - 中文
Chinese - 中文 Korean - 한국어
Korean - 한국어 Vietnamese - Tiếng Việt
Vietnamese - Tiếng ViệtТехнология векторного управления с разомкнутым контуром для синхронного реактивного двигателя
Благодаря своим уникальным преимуществам по сравнению с асинхронными двигателями и синхронными двигателями с постоянными магнитами он имеет хорошие перспективы применения в области традиционных трансмиссий и новых электромобилей.
По структуре и принципу SynRM больше похож на синхронный двигатель с постоянными магнитами, в котором постоянные магниты удалены. У них схожие математические модели. Таким образом, для режима привода SynRM: аппаратное обеспечение полностью совместимо со зрелой платформой привода синхронного двигателя с постоянными магнитами, что снижает стоимость системы управления приводом синхронного реактивного двигателя. В программном обеспечении, в соответствии с характеристиками математической модели синхронного реактивного двигателя, разработан новый наблюдатель потока для реализации векторного управления развязкой этого типа двигателя. Его блок-схема векторного управления с разомкнутым контуром выглядит следующим образом.
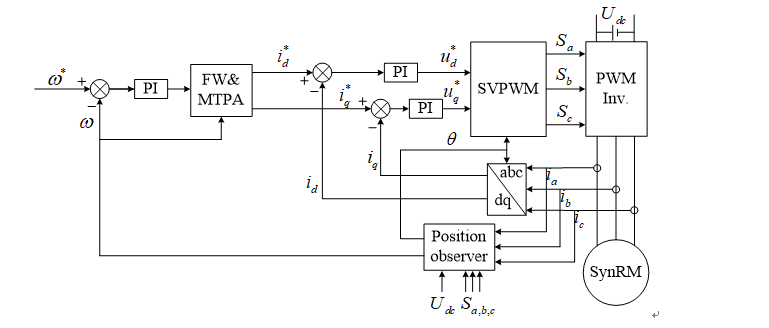
Блок-схема векторного управления с разомкнутым контуром
Векторное управление с разомкнутым контуром может обеспечить лучшие динамические и статические характеристики синхронных реактивных двигателей, но оно сильно зависит от параметров двигателя. Точность параметров двигателя в модели напрямую влияет на разумную конструкцию полосы пропускания контроллера, а также на точность наблюдения потокосцепления и наблюдения скорости, что, в свою очередь, влияет на эффективность регулирования скорости системы. Параметры синхронного реактивного двигателя более жесткие, чем у синхронного двигателя с постоянными магнитами, что создает проблемы для управления.
Принимая во внимание вышеуказанные проблемы и характеристики, наша компания провела углубленное исследование и оптимизацию технологии векторного управления с разомкнутым контуром синхронного реактивного двигателя на платформе AC310, чтобы получить превосходные динамические и статические характеристики. Конкретно значимые результаты заключаются в следующем:
(1) Основанный на существующей ведущей программной платформе векторного управления, новый наблюдатель потока используется для достижения более низкой чувствительности параметров двигателя, точного наблюдения за положением ротора и точного разделения тока.
(2) Изучение новых характеристик насыщения индуктивности двигателя. Поскольку SynRM основан на работе с реактивным крутящим моментом, явление насыщения магнитной цепи двигателя очевидно, и параметры индуктивности двигателя сильно зависят от насыщения магнитной цепи. Индуктивность по прямой оси Ld и индуктивность по поперечной оси Lq не являются фиксированными значениями, которые серьезно влияют на переходный процесс и точность управления, поэтому эффективность управления двигателем не может быть оптимизирована. В дополнение к обычному самообучению, AC310 недавно разработал функцию обучения по насыщению параметра индуктивности, которая имеет короткое время обучения и высокую точность обучения. Путем обучения можно получить характеристики насыщения индуктивности двигателя по осям d и q при различных уровнях магнитного насыщения, что позволяет более точно управлять двигателем. На рисунке ниже показана кривая обучения кривой насыщения индуктивности синхронного реактивного двигателя, используемого в реальных условиях.
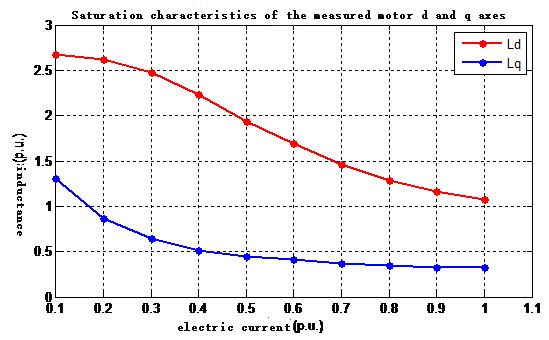
Изучение новых характеристик насыщения индуктивности двигателя
(3) Контроль MTPA. В синхронной реактивной машине потери в меди в роторе без обмотки отсутствуют, и потери в основном сосредоточены на стороне статора. Управление максимальным соотношением крутящего момента к току используется для оптимального распределения тока статора по оси dq для минимизации тока статора, тем самым минимизируя потери в меди статора для достижения оптимального КПД.
Согласно выражению крутящего момента:

Если индуктивность считается постоянной, когда θ = &пи; / 4, выходной крутящий момент при том же токе статора является наибольшим. Однако в реальной работе двигателя магнитное насыщение оказывает большое влияние на параметры двигателя. В это время оптимальный угол крутящего момента θ будет отклоняться от π/4, и оптимальный контроль эффективности не может быть достигнут при использовании постоянного угла тока 45°. С помощью характеристик насыщения индуктивности двигателя задается кривая MTPA и автоматически регулируется угол тока, так что оптимальный контроль эффективности достигается при любой частоте и нагрузке, а энергетическая эффективность синхронного реактивного двигателя достигает уровня IE4 и выше.
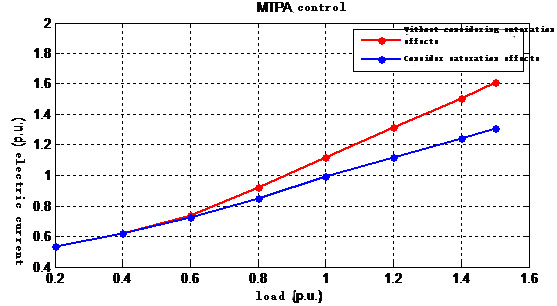
Управление MTPA
(4) Контроль ослабления поля. Двигатель подвергается управлению MTPA ниже базовой скорости, а управление ослаблением поля выполняется выше базовой скорости, чтобы максимально использовать ограничение напряжения для максимизации выходного крутящего момента и расширения диапазона постоянной мощности.
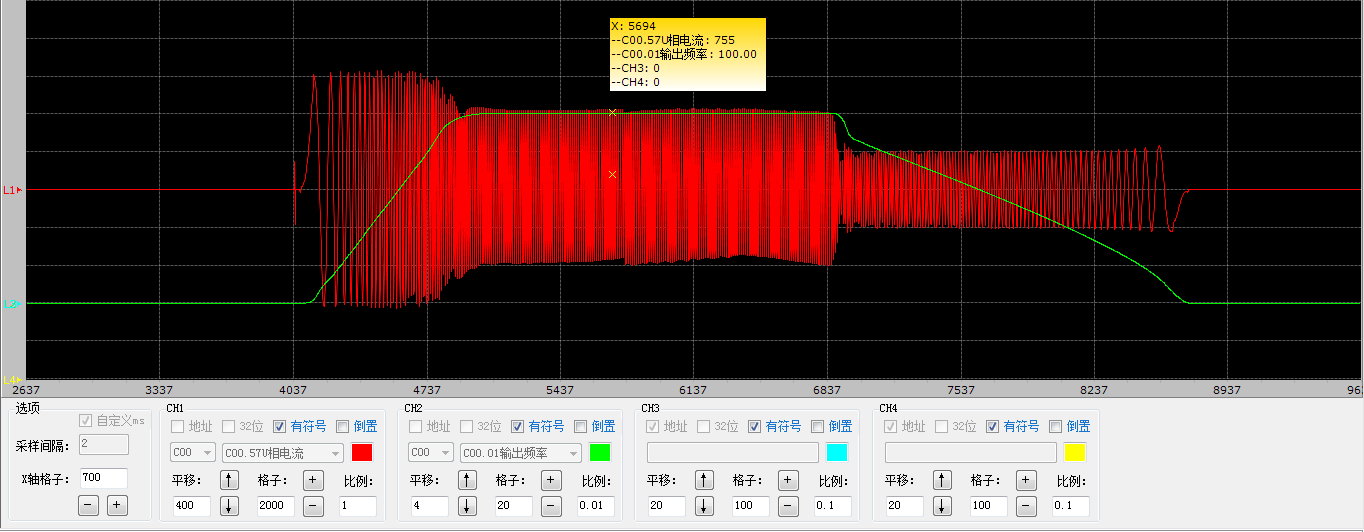
Ниже приведен частичный тестовый сигнал:
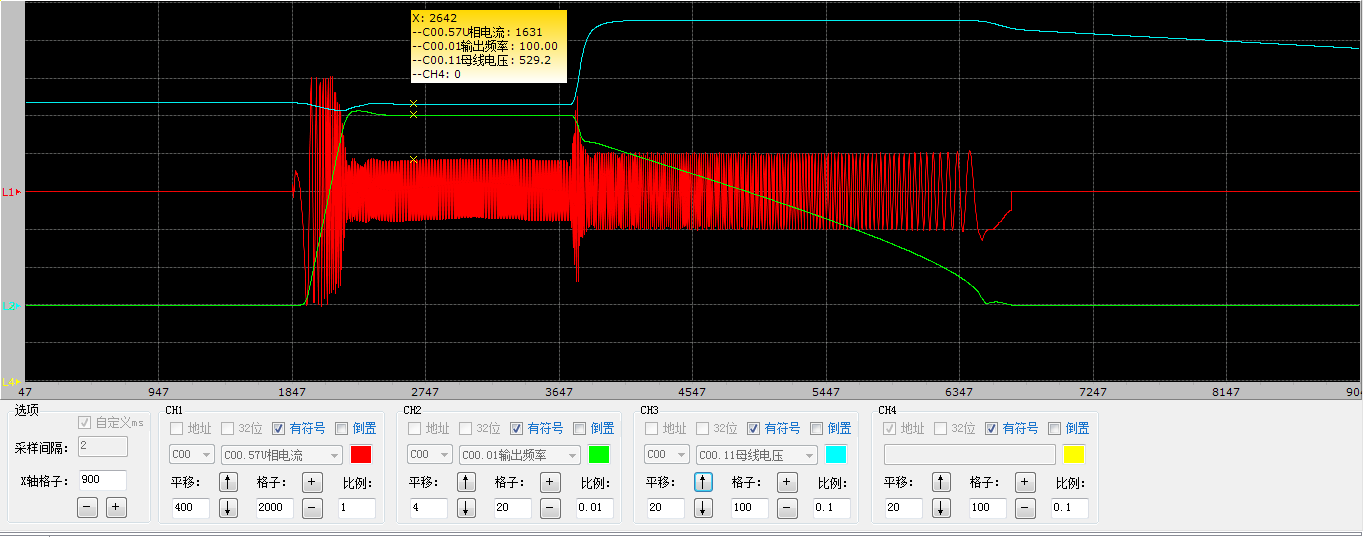
Время разгона и торможения 0,1 с, разгон без нагрузки от 0 до номинальной частоты и быстрое торможение
Время разгона и торможения 0,1 с, полная нагрузка от 0 до номинальной частоты, быстрое ускорение и быстрое торможение
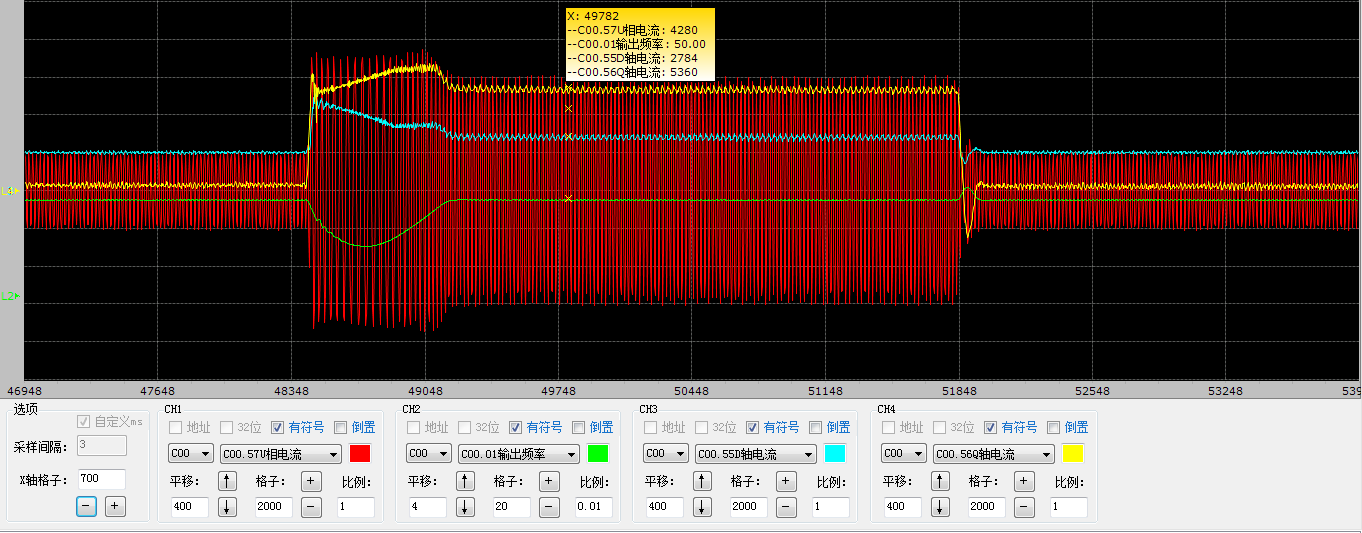
Внезапно добавлено и внезапно выгружено 180 % номинальной нагрузки
Внезапное увеличение номинальной скорости в 1,3 раза, внезапная разрядка при полной нагрузке
Входное напряжение снижено на 20 %, проверка предельной нагрузки при номинальной скорости
Сводка
Технология векторного управления с разомкнутым контуром инверторного синхронного реактивного двигателя AC310 обеспечивает стабильное и надежное управление синхронным реактивным двигателем и обеспечивает превосходный эффект управления. Это первое отечественное обобщенное производство технологии управления синхронными реактивными двигателями. Созданная из бесконечного стремления к вождению, VEICHI продолжит предоставлять клиентам новейшие и лучшие решения для электропривода.
 Оставить сообщение
Оставить сообщение